Python s OctopusLAB
Počítač ve škole 1. 4. 2026
Ondřej Tůma <info@bitbeam.cz>
Jaké je mé publikum?
a
Mátete nainstalovaný Thonny editor (https://thonny.org)?
Obsah
- BitBeam a elektronika
- ESP32 Robotic Board
- Programování
- MicroPython
- Thonny editor
- OctopusLab framework - instalace a konfigurace
- OctpusLab blikání LED a tlačítko
- OctopusLab servo
- Prostor na dotazy
BitBeam a elektronika
- Držáky pro různé elektro - desky
- Kitronik (BBC Micro:bit)
- Arduino
- RaspberryPi Pico, RaspberryPi Zero
- Držáky na elektro moduly
- 28BYJ driver
- HC-S04 a RCW-0001
- Držáky na baterie
- Držáky na motory
- NEMA 14, 17, 28BYJ
- Žluté s převodovkou, N20
ESP32 Robotic Board
- https://bitbeam.cc/cs/how-to/esp32-s3-robotic-board
- ESP32-S3
- 16MB Flash, 4MB RAM, WiFi, Bluetooth
- MPU6500 - Akcelerometr + Gyroskop + Teploměr
- 2x RGB Neopixel, LED1 Červená, LED2 Zelená
- USB-C: UART a napájení / nabíjení
- 8xPWM, 2x QWIC, Tlačítko
- TP4056 + Li-ion / Li-Pol
Programování
- C++ (Arduino)
- MicroPython
- Podpora OctopusLAB frameworku
- https://docs.octopuslab.cz/basicdoc/
- Blokové programování
- Basic, Javascript (NodeMCU)
MicroPython
| Oblast | Python | MicroPython |
|---|---|---|
| Prostředí | PC / server | Mikrokontrolér |
| RAM | GB | KB |
| Stdlib | Plná | Ořezaná |
| Hardware | Přes knihovny | Přímý (machine) |
| Vlákna | threading | Omezeno / asyncio |
| Balíčky | pip | mip / upip |
| Spouštění | Skript / venv | main.py / REPL |
- Funkce / procedury
- Objekt a metoda
- Modul
- Podmínky
- Smyčky
- Proměnné
Thonny editor
- instalace MicroPythonu
- Běh -> Configure interpreter -> Install or Update MicroPython
- Při flashování třeba držet Boot tlačítko
- konfigurace a připojení k ESP32 desce
- Běh -> Configure interpreter -> Port
- hello world!
print("Ahoj svete!")
OctopusLab framework - instalace
https://github.com/octopuslab-cz/esp32_micropython_framework:
from time import sleep import network import mip wlan = network.WLAN(network.STA_IF) wlan.active(True) sleep(5) wlan.connect('ssid', 'password') sleep(5) mip.install("github:octopuslab-cz/esp32_micropython_framework" "/package.json", target=".")
OctpusLab konfigurace
setup() ... [ou] - octopus update (octopusLAB Framework) [oe] - octopus examples > download mip examples/... [os] - octopus shell > install uPyShell -------------------------------- [ds] - device setting [si] - system info [pi] - PINs info [mi] - modules info - table -------------------------------- [q] - quit setup select:
OctpusLab blikání LED
from pinouts.esp32s3_robotics import * from components.led import Led Led(LED1_PIN).blink() # value(0) from components.ws_rgb import Rgb from components.ws_rgb.colors_rgb import * rgb = Rgb(WSLED_PIN, 2) rgb.test() rgb.color(BLUE, 0)
OctpusLab tlačítko
from pinouts.esp32s3_robotics import * from machine import Pin from components.button import Button def test(): print("Test") btn = Button(Pin(BUTT0_PIN, Pin.IN)) btn.on_press(test) # on_long_press() a on_release()
Řízení servo motoru
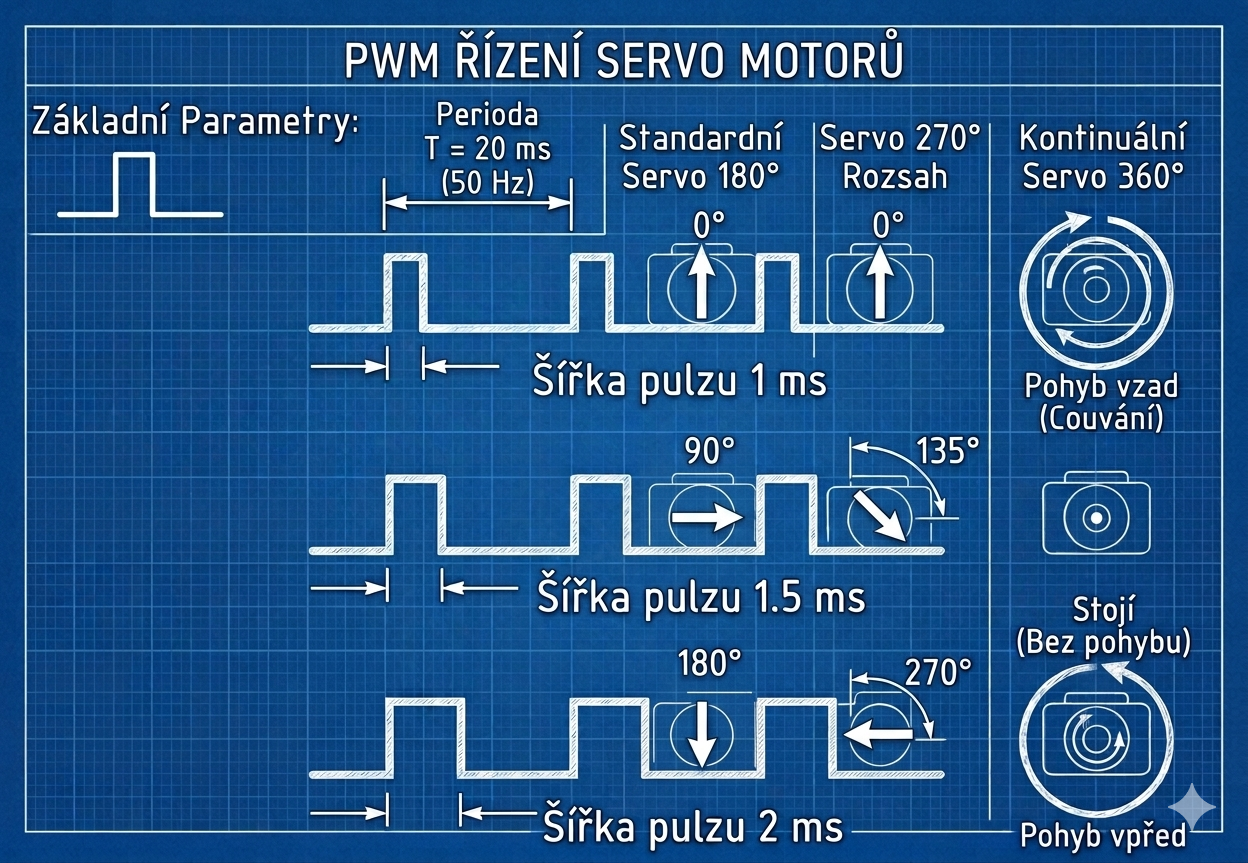
OctopusLab servo
| čas | rychlost |
|---|---|
| 0.5 ms | 100% |
| 1.5 ms | 0 |
| 2.5 ms | -100% |
from components.servo import Servo servo1 = Servo(PWM1_PIN) def servo_on(): # servo1.set_degree(0) servo1.pwm.duty_ns(500_000) sef servo_off(): # servo.Servo(PWM1_PIN).set_degree(58) servo1.pwm.duty_ns(1_500_000) btn = Button(Pin(BUTT0_PIN, Pin.IN)) btn.on_press(servo_on) btn.on_release(servo_off)